Robot Design & Manufacturing
📅
Tools: Solidworks, Arduino, Mill, Lathe, Bandsaw
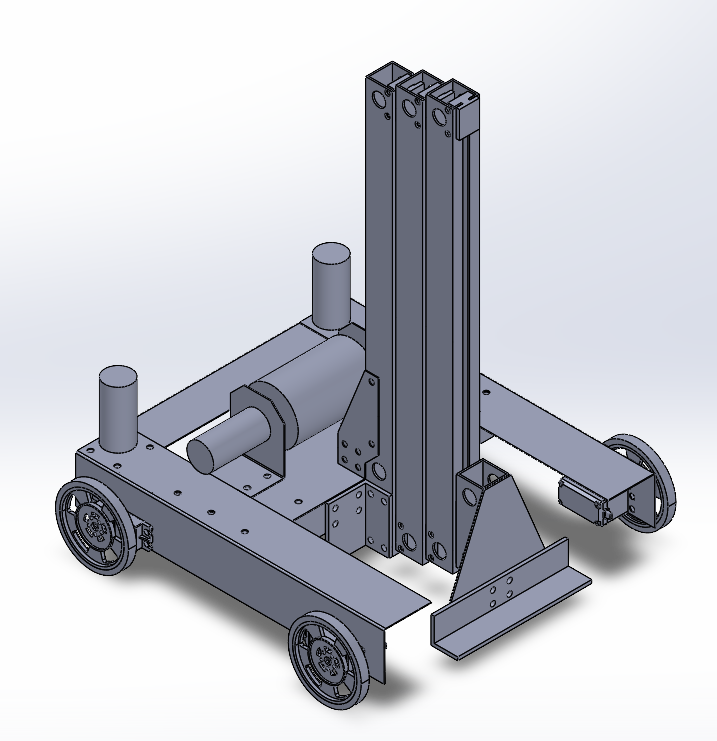
I designed and built a robot for MIT course 2.007 in the Spring of 2022. Students in the class were tasked with building robots over the course of the semester. These robots would then have to maneuver a game board in competition against other students.
My robot successfully performed the following tasks…
- Lifted heavy (10 lb) object
- Pressed high altitude buttons (40” in air)
- Climbed slope of 30° (using four-wheel drive)
- Moved plastic balls with rear-actuated forks
- Autonomously drop a small wooden peg into a hole
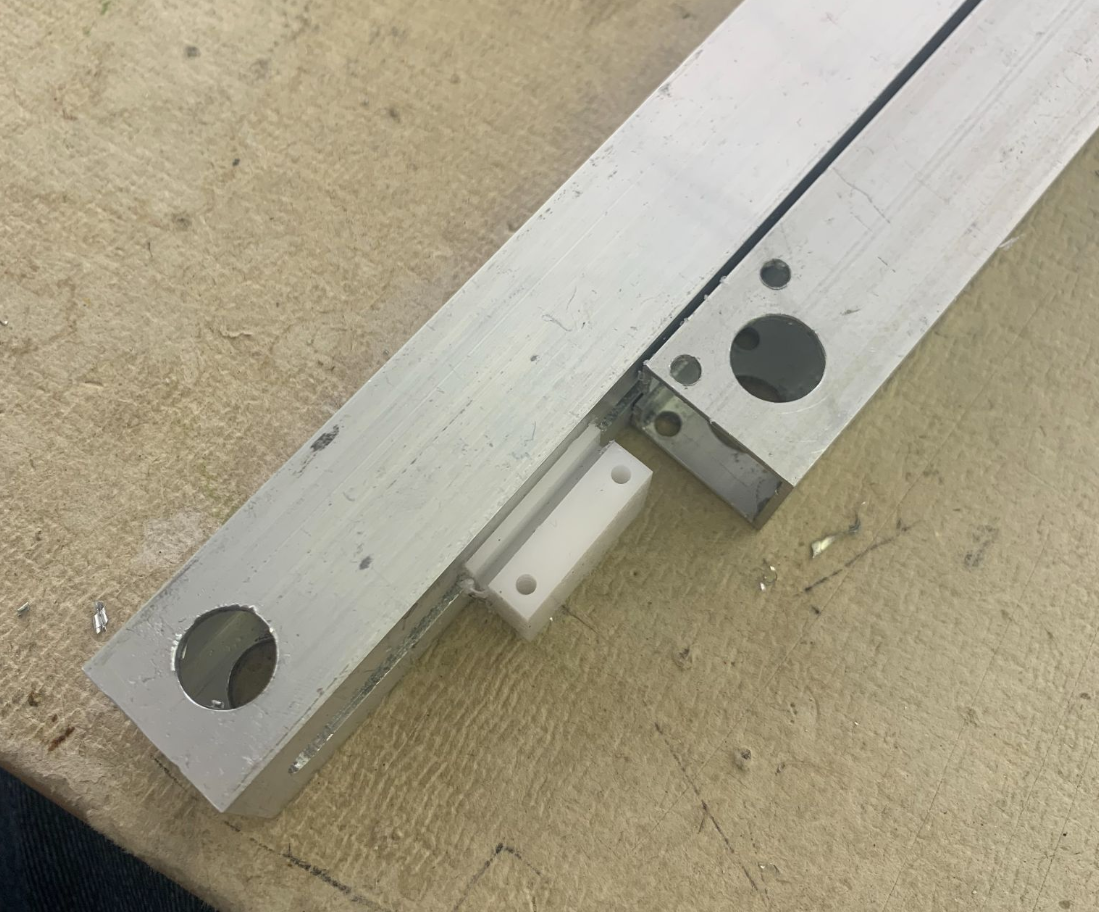
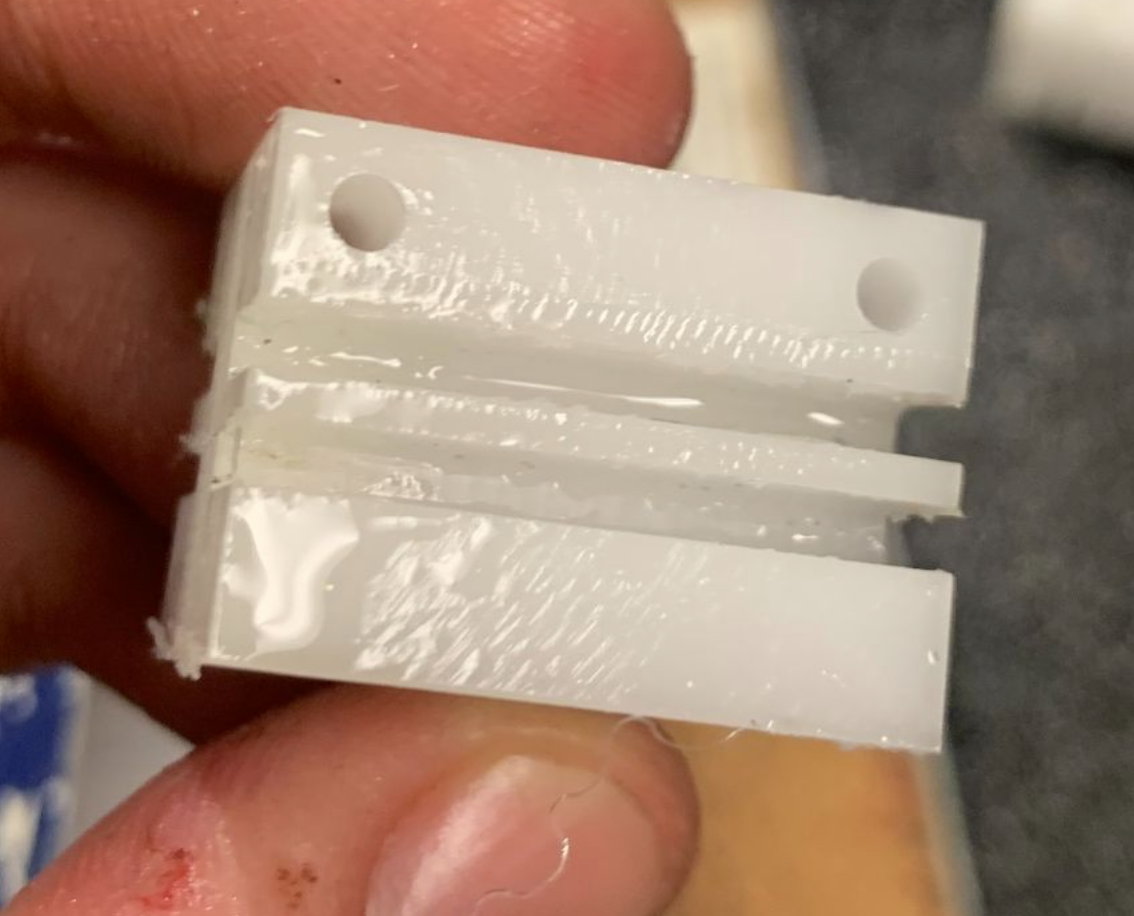
The main feature of the robot was a pulley-driven telescoping lift that could be used for lifting and general vertical actuation. The system was iteratively tested and redesigned over the course of the semester.

All parts were manufactured by hand using aluminum and Delrin plastic. For the telescoping lift, Delrin bearings were made to fit between channels of Aluminum. This was used to couple segments of the lift with minimal friction. These parts had incredibly low tolerances of ±0.001 inch.