Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust Grasping
Published in arXiv, 2025
Currently under review. Pre-print accessible here.
Open-source code and CAD files are available on GitHub.
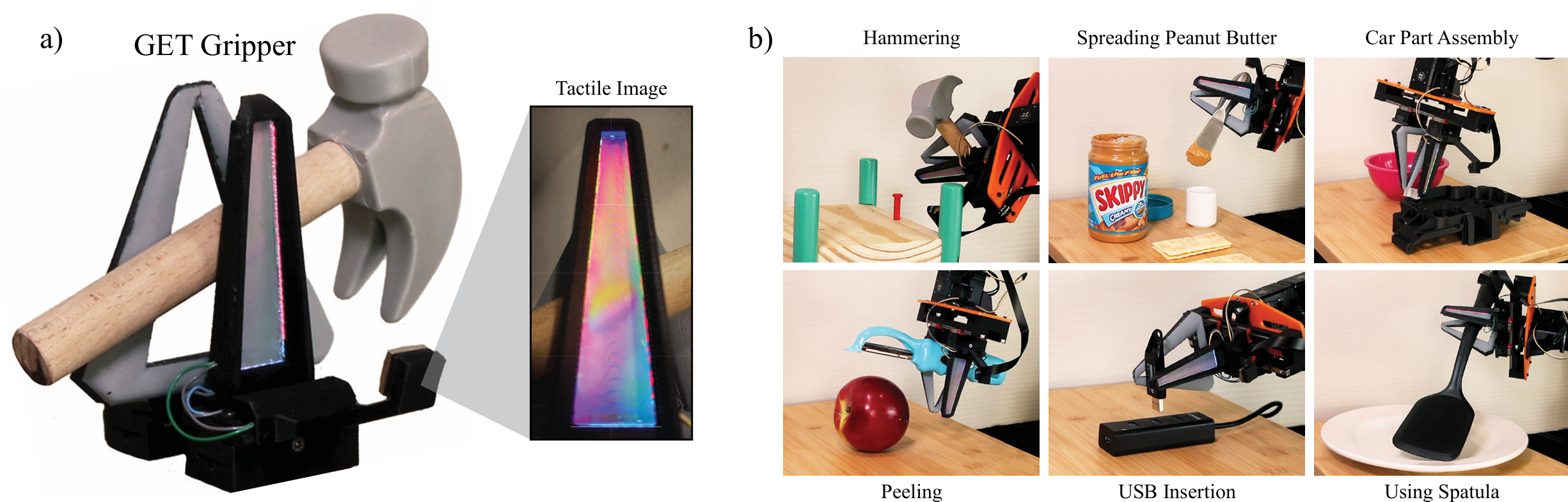
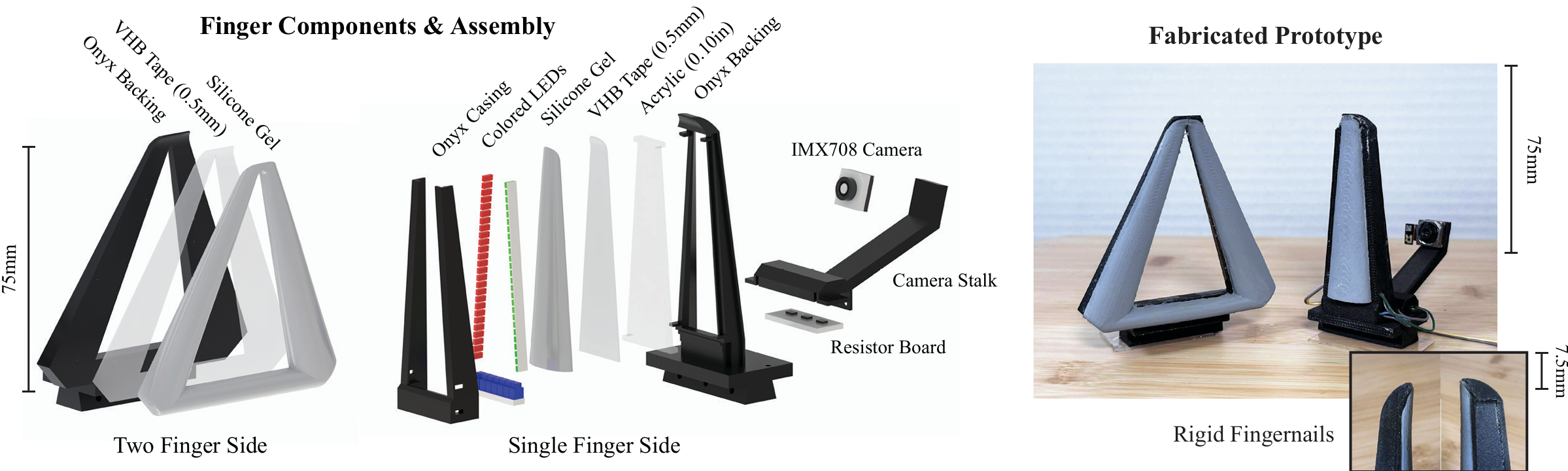
Abstract: We introduce the Grasp EveryThing (GET) gripper, a novel 1-DoF, 3-finger design for securely grasping objects of many shapes and sizes. Mounted on a standard parallel jaw actuator, the design features three narrow, tapered fingers arranged in a two-against-one configuration, where the two fingers converge into a V-shape. The GET gripper is more capable of conforming to object geometries and forming secure grasps than traditional designs with two flat fingers. Inspired by the principle of self-similarity, these V-shaped fingers enable secure grasping across a wide range of object sizes. Further to this end, fingers are parametrically designed for convenient resizing and interchangeability across robotic embodiments with a parallel jaw gripper. Additionally, we incorporate a rigid fingernail to enhance small object manipulation. Tactile sensing can be integrated into the standalone finger via an externally-mounted camera. A neural network was trained to estimate normal force from tactile images with an average validation error of 1.3 N across a diverse set of geometries. In grasping 15 objects and performing 3 tasks via teleoperation, the GET fingers consistently outperformed standard flat fingers. Finger designs for use with multiple robotic embodiments are available on GitHub.