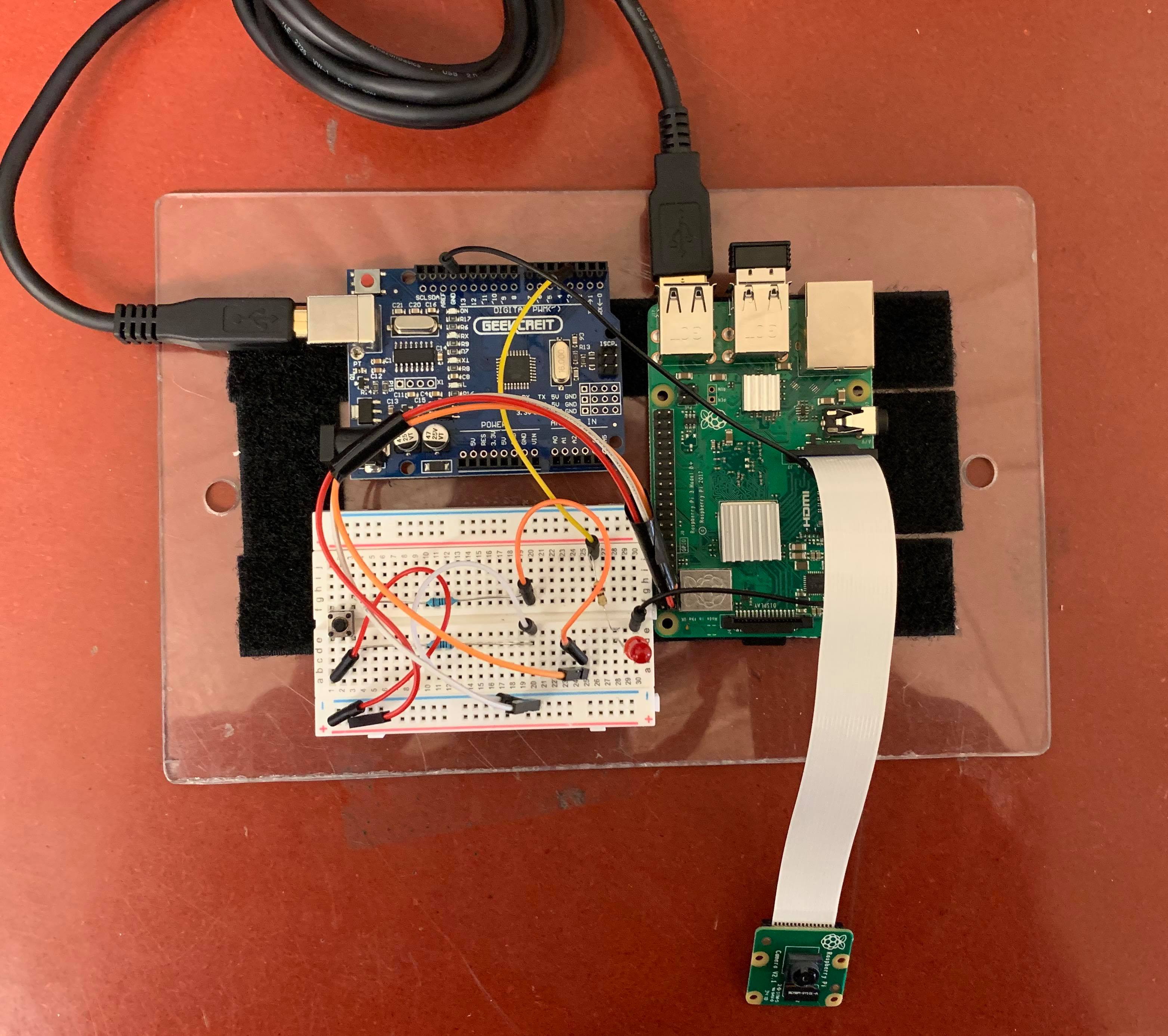
Self-Driving Car Automated Lost & FoundJanuary 2019 - Prototyped a system that could be placed in an autonomous car to proactively alert passengers when an item is left behind. |

Posts by Collection
portfolio
Electric SkateboardJanuary 2019 - Designed and built an electric skateboard to gain hands-on engineering experience. Helped introduce me to CNC machining. |

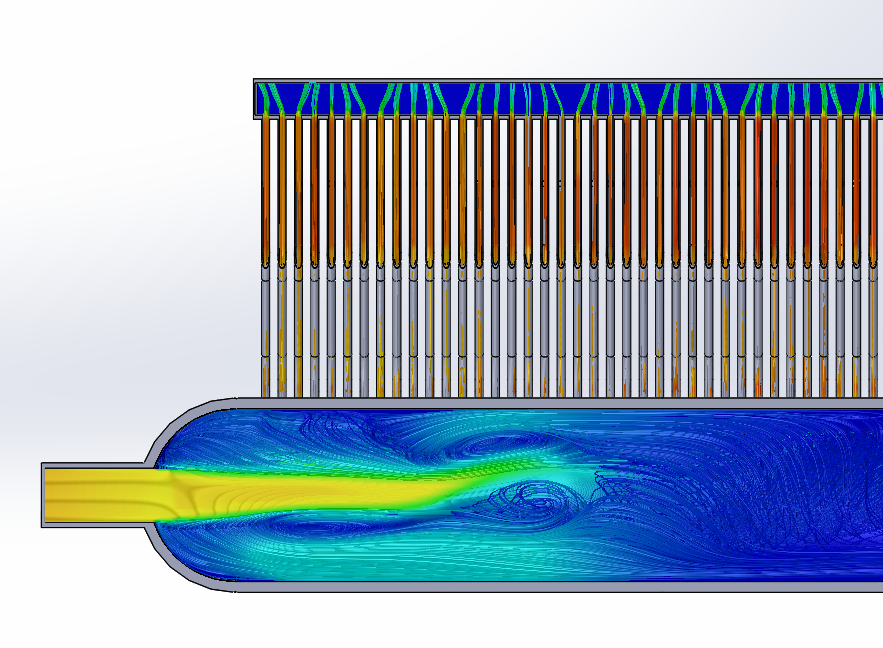
Brayton Energy: Analytical DesignAugust 2019 - Used mechanical and fluid simulations to inform the design of a header block for a heat exchanger in a concentrated solar power plant. |
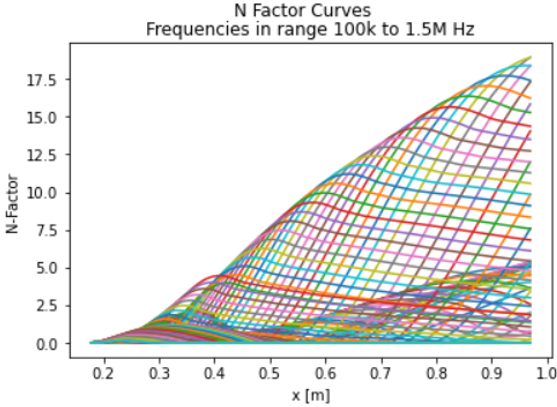
NASA: Machine Learning for Prediction of Flow TransitionMay 2021 - Tested and refined a machine learning architecture that could be used to predict the onset of turbulence across an airfoil. |
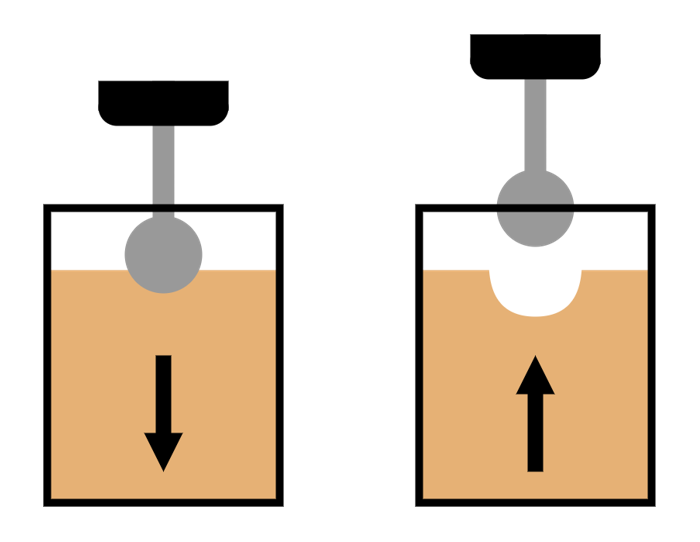
Oatmeal Viscosity Experiment ⭐December 2021 - Conducted an experiment for an undergrad course at MIT where I measured the viscosity of oatmeal with changing recipe. |
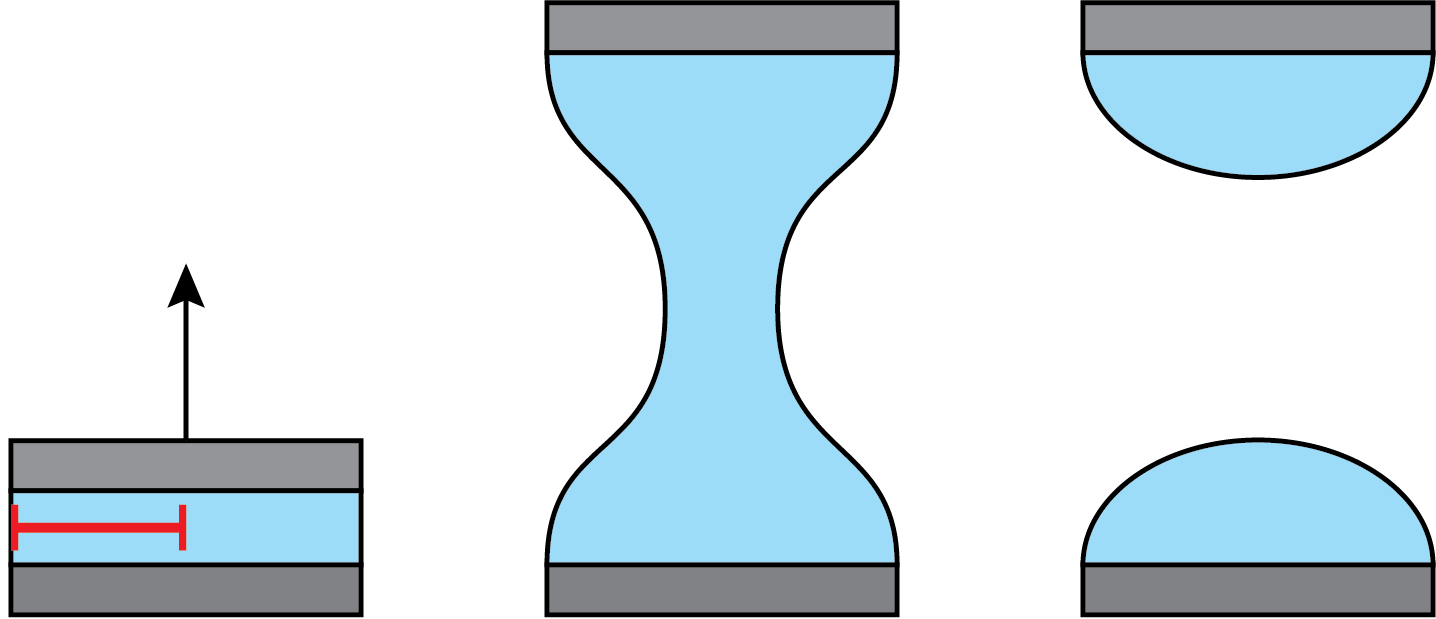
CaBER Video Processing Library ⭐January 2022 - Wrote a code library which could be used to automatically characterize fluids from footage of CaBER experiments. This is helpful in studying the behavior of non-Newtonian fluids. |
Robot Design & ManufacturingMay 2022 - Designed and built a task-oriented robot for an undergrad course at MIT. The robot was designed to complete tasks on a gamboard in competition with other students. |

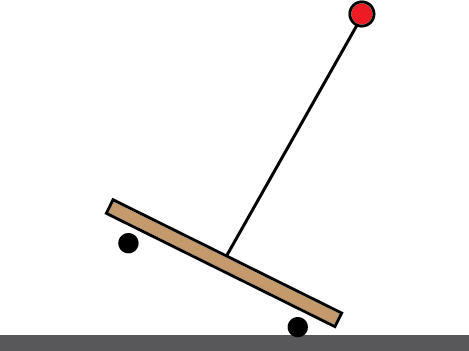
Underactuated Skateboard Control System ⭐May 2022 - Optimized dynamic trajectories to perform tricks on a simplified 2D skateboarding model. By controlling just the center of mass position of the rider, we can manipulate the board's movement. |
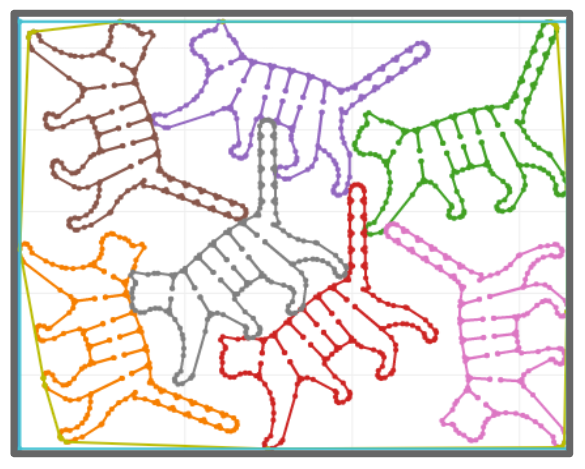
Markforged: Part Packing ⭐August 2022 - Developed a geometric algorithm to optimize the packing space on 3D printing build plate. Using simulated annealing approach, could fit 15+% more parts than previous method. |
Firehose Cleaner ⭐December 2022 - Designed a portable system to clean carcinogens off a firehose after a fire. The system is fully hydro-powered and has washing and spooling components. |

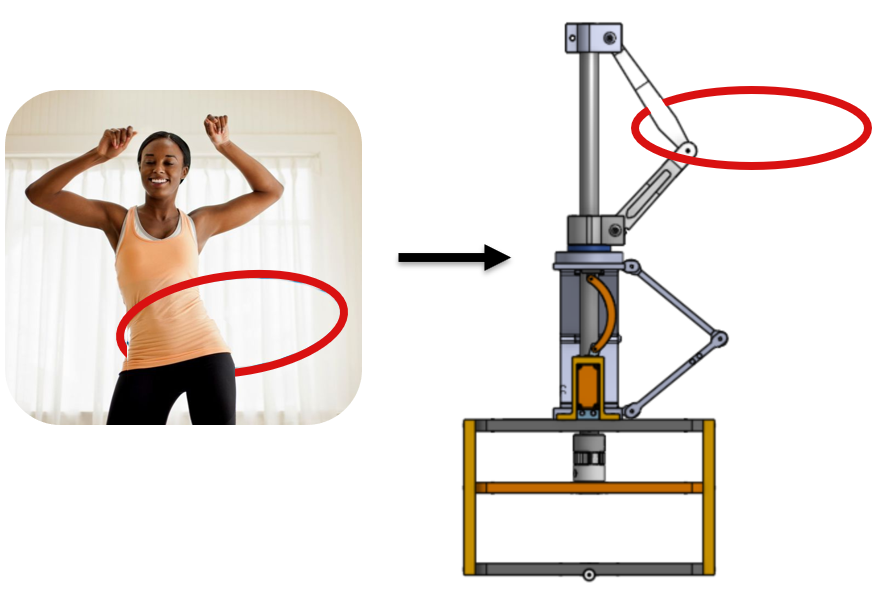
Hula Hooping Robot ⭐December 2022 - Built a robot to learn more about the mechanical principles of hula hooping. Abstracted the system to two degrees of freedom and simulated trajectories before implementing on hardware. |
Rock Skipping Robot ⭐December 2022 - Developed a control architecture to pick-up a rock from a known location and skip it across water. The system was implemented and tested in a custom physics-based simulator. |

Yo-yo ManufacturingMay 2023 - Worked on a team to design and mass produce custom plastic yo-yos. Parts were manufactured using injection molding and thermoforming processes. |

publications
Decoupled Kinodynamic Planning for a Quadruped Robot over Complex TerrainM. Burgess, Decoupled Kinodynamic Planning for a Quadruped Robot over Complex Terrain. MIT dSpace. 2023. |

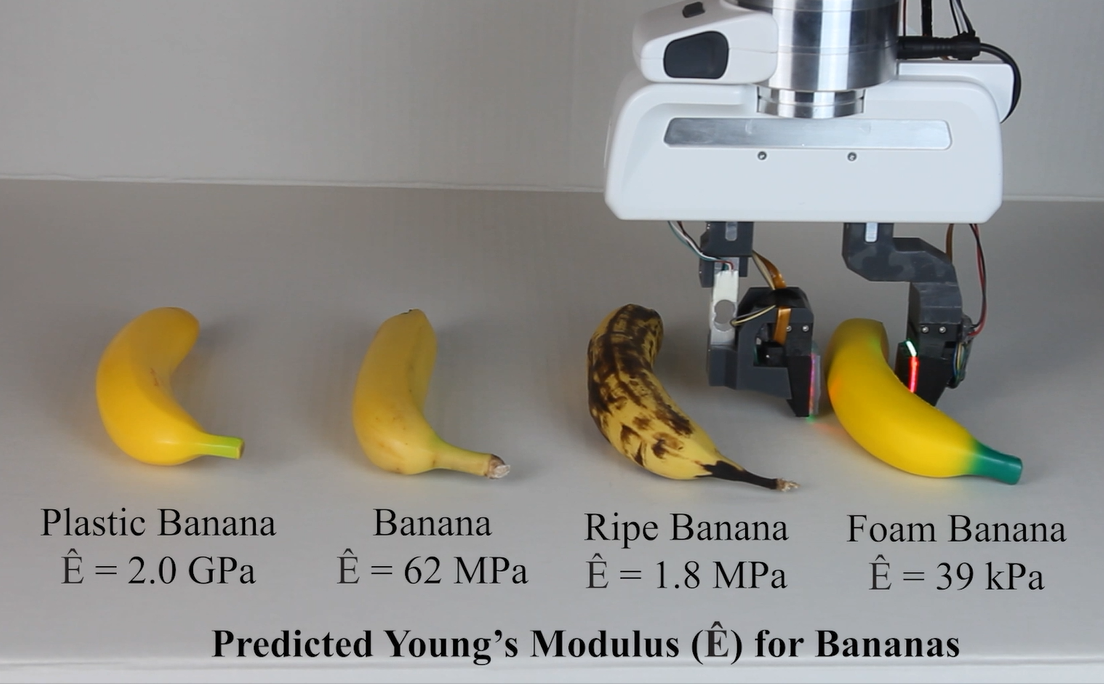
Learning Object Compliance via Young’s Modulus from Single Grasps with Camera-Based Tactile SensorsM. Burgess, J. Zhao, L. Willemet, Learning Object Compliance via Young's Modulus from Single Grasps with Camera-Based Tactile Sensors. arXiv. 2025. |
Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust GraspingM. Burgess, E. Adelson, Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust Grasping. arXiv. 2025. |

talks
Talk 1 on Relevant Topic in Your FieldPublished: |
Tutorial 1 on Relevant Topic in Your FieldPublished: |
Talk 2 on Relevant Topic in Your FieldPublished: |
teaching
Teaching experience 1Undergraduate course, University 1, Department, 2014 |
Teaching experience 2Workshop, University 1, Department, 2015 |