Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust GraspingM. Burgess, E. Adelson, Grasp EveryThing (GET): 1-DoF, 3-Fingered Gripper with Tactile Sensing for Robust Grasping. arXiv. 2025. |

Publications

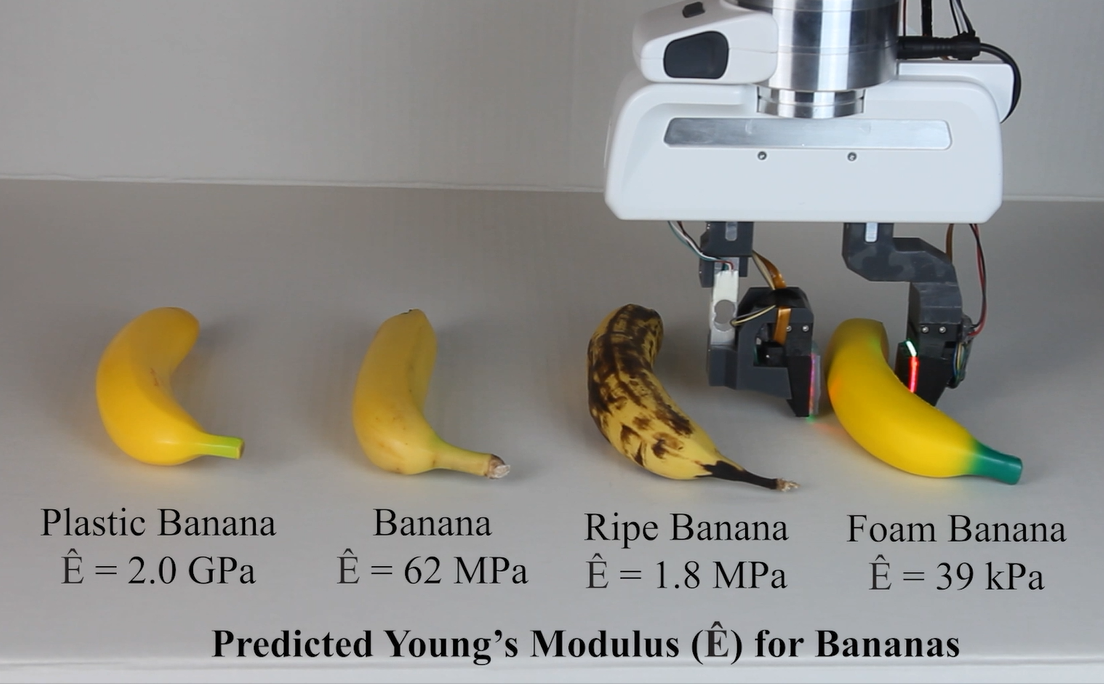
Learning Object Compliance via Young’s Modulus from Single Grasps with Camera-Based Tactile SensorsM. Burgess, J. Zhao, L. Willemet, Learning Object Compliance via Young's Modulus from Single Grasps with Camera-Based Tactile Sensors. arXiv. 2025. |
Decoupled Kinodynamic Planning for a Quadruped Robot over Complex TerrainM. Burgess, Decoupled Kinodynamic Planning for a Quadruped Robot over Complex Terrain. MIT dSpace. 2023. |
